Configurez les ports d’entrée/sortie
Après avoir vu des généralités sur la configuration des périphériques, commençons par nous intéresser à ceux qui offrent le moyen d’interfacer le monde numérique avec le monde physique : les ports d’entrée/sortie. Vous allez découvrir dans la suite de ce chapitre ce que sont ces fameux GPIO, ainsi que les moyens pour les configurer et les contrôler.
VIDEO P3_C3_V1
Comprendre les GPIO en général
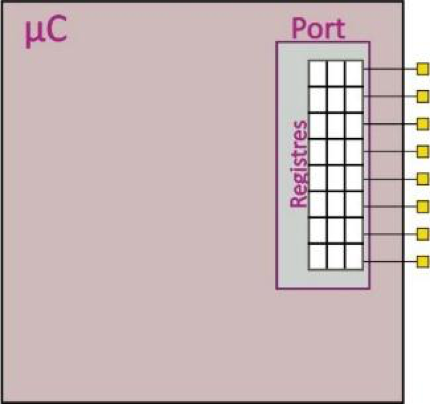
Un microcontrôleur interagit avec les éléments extérieurs par le biais de plusieurs fils que l’on appelle broche, ou pin en anglais. Ces broches sont regroupées généralement par paquet de 8 (octet) ou 16 (mot) pour former ce que l’on nommera par la suite des ports d’entrée/sortie (I/O ports). Du point de vue logiciel, un port est un ensemble de registres.
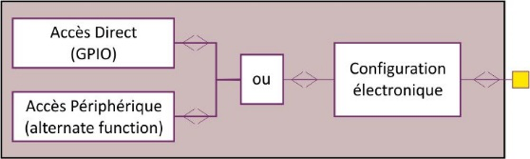
Une broche peut être pilotée soit directement par le biais de registres dédiés (on parle alors de General Purpose Input Output, GPIO) soit indirectement par le biais d’un périphérique (on parle alors d’Alternate Function). Dans tous les cas, il sera nécessaire de configurer l’étage électronique qui permet d’interfacer le matériel et le logiciel.
Dans la grande majorité des cas, les différentes broches d’un même port sont configurables indépendamment des autres broches.
Une broche d’un port peut être configurée en entrée ou en sortie (le sens étant celui vu du microcontrôleur), c’est ce que l’on appelle sa direction.
Lorsqu’une broche est mise en entrée il est possible d’observer des signaux entrants dans le microcontrôleur. En fonction de sa configuration, nous pouvons directement exploiter la valeur physique du signal en la convertissant en une valeur numérique (nous verrons cela plus en détail dans la partie dédiée à l’ADC), ou bien l’observer sous une forme binaire logique (0 ou 1), les états haut et bas étant fixés en fonction d’un seuil sur la tension en entrée. Dans le dernier cas d’accès direct (GPIO), un registre appartenant au port permet au logiciel, par une simple lecture, de connaître l’état logique de chacune des broches composant le port.
Lorsqu’une broche est configurée en sortie, il est possible de fixer une tension sur une broche. Dans le cas de l’utilisation des alternate functions cette tension est fixée par un autre périphérique (UART, convertisseur numérique-analogique, PWM, etc.). Dans le cas d’accès direct, un registre propre au port impose une tension haute (valeur logique 1) ou basse (valeur logique 0) au circuit qui lui est connecté.
Sur la majorité des microcontrôleurs actuels les broches peuvent être configurées soit en entrée soit en sortie. Pour utiliser l’accès direct un port possède donc au moins un registre de configuration qui spécifie pour chaque broche sa direction, un registre pour lire l’état binaire des broches mises en entrée et un registre pour imposer l’état binaire des broches mise en sortie.
Et sur le STM32F103 comment fait-on ?
Sur cette famille de microcontrôleur, le nombre de ports disponibles varie en fonction de la taille du boîtier. Pour la carte nucleo qui vous a été proposée, le boîtier LQFP64 a seulement quatre ports de disponibles. Ils sont identifiés par les lettres A, B, C et D. Les ports A, B et C ont chacun 16 broches et le port D seulement 3. Le STM32F103-LQFP64 peut avoir au mieux 51 broches utilisables pour s’interfacer avec un process. A noter que pour d’autres versions de ce processeurs (en boiter LFPQ100 par exemple), il est possible de trouver jusque 7 ports GPIO, d’où l’existence dans la documentation des ports E, F et G qui n’ont pas de réalité dans le microcontrôleur sur lequel nous basons nos exemples.
Pour désigner un port, nous utiliserons par la suite la notation GPIO suivie de la lettre le désignant. Ainsi GPIOA désigne le port A. On ajoutera parfois un point suivi d’un nombre pour désigner la broche, ainsi GPIOB.10 désigne la broche 10 du port B. Comme les différents ports sont structurés et fonctionnent de la même manière, la documentation fait généralement référence aux GPIOx, où x est à remplacer par la lettre correspondante au port concerné.
Trouver la bonne adresse
Comme nous l’avons dit dans le chapitre précédent, différents registres permettent de configurer un périphérique. Ces registres ont des adresses mémoires spécifiques qu’il faut connaître si nous voulons fixer une configuration. Il faut donc commencer par trouver ces adresses. Pour cela, vous n’avez pas le choix, il faut rentrer dans la documentation technique du microcontrôleur !
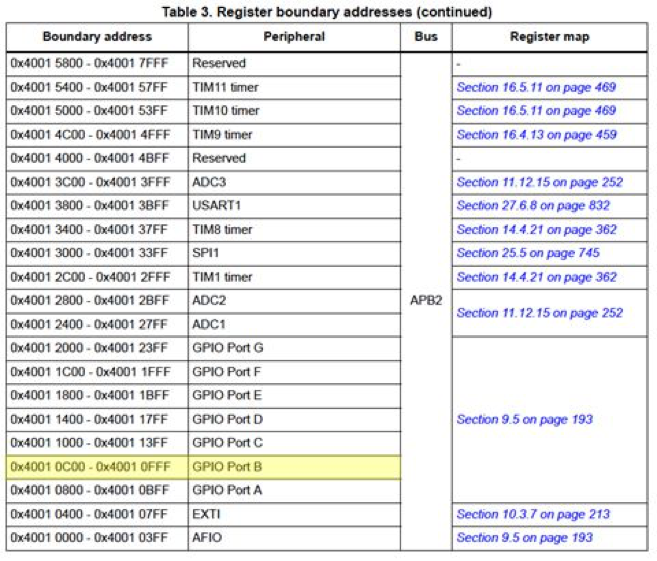
Pour la famille des microcontrôleurs STM32F1xx, le document de référence est le RM0008 disponible sur le site de la société ST. Nous pouvons y trouver la liste des adresses associées à chaque périphérique. Ainsi, nous découvrons page 50 que, par exemple, l’ensemble des registres du port B sont fixés sur la plage mémoire de 0x4001 0C00 à 0x4001 0FFF.
Mais comment trouver les différents registres d’un port ?
Pour répondre à cette question, il faut de nouveau explorer la documentation — vous aurez compris que sans consulter les documents techniques, il est impossible de faire le travail — et se référer au chapitre dédié au GPIO (chapitre 9, page 158). Au début du chapitre, nous trouvons une description générique du périphérique et à la fin un tableau qui présente sous forme synthétique l’ensemble de ses registres (p. 193). Une description bit à bit des registres est aussi faite dans des sections dédiées.
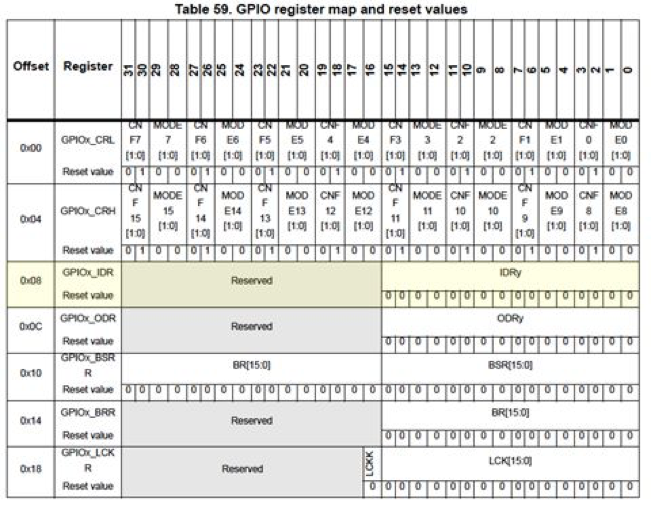
Le registre contenant l’état des broches est nommé GPIOx_IDR. D’après le tableau, il a un offset de 0x08, ce qui signifie que l’adresse de GPIOx_IDR est celle de base du port x auquel s’ajoute un décalage de 0x08, soit pour le port B une valeur de 0x4001 0C08.
Pour lire la valeur du registre IDR du port B, il est donc possible en C de faire
valueIDR = *(int *)0x40010C08; // lecture de la valeur du registre IDRÀ noter que la variablevalueIDR contiendra alors la valeur logique des broches du port B.
Pour résumer, si on souhaite manipuler le registre GPIOx_IDR, il faut chercher l’adresse de base du périphérique, puis décaler cette adresse de la valeur d’offset propre au registre.
Vous aurez compris que tout cela peut devenir très vite fastidieux !
Utiliser le travail des autres
Heureusement, ST-MicroElectronics a compris qu’il était nécessaire de faciliter la vie des programmeurs. C’est pourquoi, ils fournissent des fichiers de configuration avec la majorité des microcontrôleurs. Dans notre cas, la société ST a produit le fichier STM32f10x.h qui contient un ensemble de définitions qui va grandement nous aider.
Dans ce fichier nous allons trouver des structures C prédéfinies pour accéder plus rapidement aux registres, ainsi qu’un ensemble de variables ayant pour valeur les adresses des périphériques.
Pour les ports, nous trouvons dans le fichier STM32f10x.h une structure GPIO_TypeDef définie comme
Typedef struct
{
__IO uint32_t CRL;
__IO uint32_t CRH;
__IO uint32_t IDR;
__IO uint32_t ODR;
__IO uint32_t BSRR;
__IO uint32_t BRR;
__IO uint32_t LCKR;
} GPIO_TypeDef;où __IO uint32_t est un type pour des valeurs volatiles signées en 32 bits et nous y retrouvons la liste de tous les registres d’un port ordonnés en fonction de leur offset.
Recherchons maintenant dans STM32f10x.h toutes les informations relatives au port B. Nous découvrons une adresse pour GPIOB définie par
#define GPIOB ((GPIO_TypeDef *) GPIOB_BASE)et si nous continuons à explorer le fichier de définition, nous trouvons :
#define GPIOB_BASE (APB2PERIPH_BASE + 0x0C00)
...
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)
...
#define PERIPH_BASE ((uint32_t)0x40000000)Donc en remontant la chaîne, nous avons GPIOB qui prend la valeur 0x40000000+0x10000+0x0C00 soit 0x4001 0C00 qui est bien l’adresse de base du GPIOB fournie par la documentation.
Pour avoir accès au registre qui vous intéresse, il ne reste plus qu’à utiliser les champs de la structure GPIO_TypeDef. Ainsi, pour lire le registre IDR du port B, nous aurons simplement à écrire :
value = GPIOB->IDR ; // value prend la valeur stockée à l’adresse 0x40010C08Configurer la direction
Vous savez comment trouver et manipuler l’adresse d’un registre pour le STM32, maintenant il faut comprendre leur contenu.
Concentrons-nous sur les registres pour configurer les broches d’un port. D’après la documentation, ce sont les registre GPIOx_CRL et GPIOx_CRH qu’il faut utiliser pour configurer la direction d’un port.
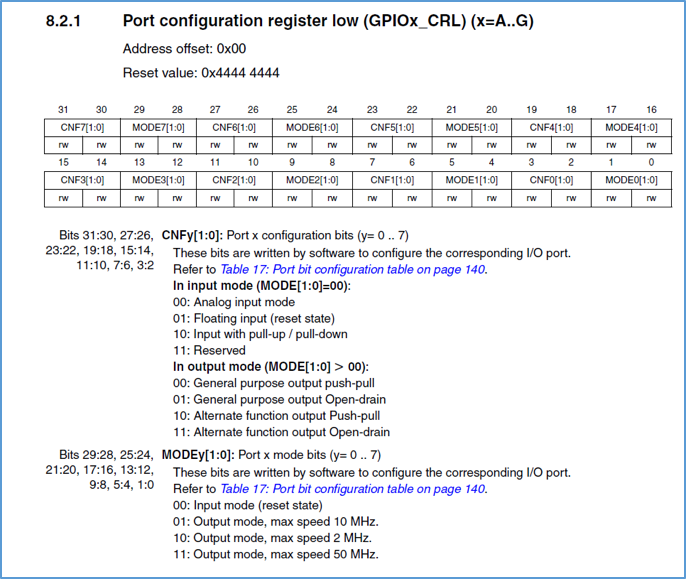
Malheureusement, on constate qu’il faut quatre bits pour configurer un seul port et qu’il y a huit configurations possibles. Le tableau ci-après décrit toutes les possibilités.
direction | mode | Description | Valeur du champ de bits |
|---|---|---|---|
input | Analog | mode d’entrée permettant une acquisition directe de la tension (l’état binaire de la broche n’est plus connue sur le registre) | 0000 |
input | Floating input | mode de base pour une entrée, si aucune tension n’est appliquée, la valeur n’est pas connue | 0100 |
input | With pull-up / pull-down | mode d’entrée pour lequel la valeur il est possible de fixer l’état par défaut à 0 (pull down) ou à 1 (pull-up) | 1000 |
input | Analog | Non utilisé | 1100 |
Output(*) | Push-pull | mode de sortie dans lequel la tension appliquée à la broche est toujours forcée à 0 ou 1 | 0001 |
Output(*) | Open-drain | mode de sortie dans lequel le niveau de tension haut est fixé par le circuit connecté à la broche | 0101 |
Output(*) | Alternate function push-pull | mode de sortie identique au mode push-pull, mais l’état de la broche est contrôlé par un autre périphérique que le port | 1001 |
Output(*) | Alternate function open-drain | mode de sortie identique au mode open-drain, mais l’état de la broche est contrôlé par un autre périphérique que le port | 1101 |
(*) trois valeurs possible pour définir le port en sortie (01,10 ou 11) qui correspondent à des fréquences d’entrée maximale admissible différentes. La valeur 01 convient très bien pour la grande majorité des cas.
Reprenons : il y a 16 broches sur un port, il faut 4 bits par broche pour la configurer en entrée ou sortie, soit 64 bits pour configurer l’ensemble des broches d’un port. Or un registre fait 32 bits. Il faut donc deux registres pour configurer l’ensemble des broches du même port d’où l’existence de deux registres : CRL et CRH.
Le registre CRL (L pour low) permet de configurer les broches de 0 à 7 et le registre CRH (H pour high) de 8 à 15.
Supposons que nous voulions configurer la broche 5 du port A en entrée (input floating). Il faut alors affecter la valeur binaire 0b0100 aux bits b23 b22 b21 b20 du registre CRL. Pour cela on écrit simplement
GPIOA->CRL = GPIOA->CRL & ~(0xF << 20); // Mise à 0 des bits b23 b22 b21 b20
GPIOA->CRL = GPIOA->CRL | (0x1 << 22); // Mise à 1 du bit b22Dans la même idée, pour mettre la broche 10 du port A en sortie (output push-pull), il faut fixer la valeur 0b0001 aux bits b11 b10 b9 b8 dans le registre CRH, soit
GPIOA->CRH = GPIOA->CRH & ~(0xF << 8); // Mise à 0 des bits b11 b10 b9 b8
GPIOA->CRH = GPIOA->CRH | (0 << 8); // Mise à 1 du bit b8Lire les valeurs en entrée
En continuant l’exploration des registres liés à un port, on rencontre le registre IDR qui contient sur ses 16 premiers bits une image de l’état des broches. Pour connaître cette valeur, il suffit donc d’aller lire le registre IDR.
Supposons que nous voulons connaître la valeur de la broche 7 du port C, nous écrivons alors simplement :
valueb7 = ( GPIOC->IDR & (0x1 << 7) ) >> 7;Rappelons que si on utilise l’état de la broche pour faire un test, le dernier décalage à droite n’est pas nécessaire et que l’on peut simplement écrire
if (GPIOC->IDR & (0x1 << 7)) {
...
}condition qui sera vraie si le bit 7 de IDR est à 1 et fausse si le bit est à 0.
Écrire sur un port en sortie
Contrôler l’état d’une broche en sortie n’est pas compliqué. Pour cela nous utilisons le registre ODR, dont les seize premiers bits fixent l’état de chaque broche en sortie d’un port. Ainsi pour mettre à 1 la broche 8 du port B, nous fixons simplement à 1 le bit 8 de ODR, soit
GPIOB->ODR = GPIOB->ODR | (1 << 8);Un exemple simple
Passons à un exemple concret. Vous allez créer un programme qui allume la led branchée sur la broche 5 du port A (led verte sur la carte nucleo) et l’éteindre quand le bouton USER est appuyé, bouton qui est branché sur la broche 13 du port C.
Pour réaliser la suite, il vous faut un projet configuré (voir la partie 1) avec un main qui ne fait rien, mais qui inclut le fameux fichier STM32f10x.h. Votre fichier main.c contient donc uniquement les lignes suivantes :
#include “STM32f10x.h”
int main (void)
{
while(1)
{
}
return 0
}Pour commencer, ajouter dans le main avant la boucle while(1) la ligne
RCC->APB2ENR = RCC->APB2ENR | RCC_APB2ENR_IOPAEN | RCC_APB2ENR_IOPCEN;sans chercher à comprendre ce que cela fait (nous verrons cela dans le chapitre suivant).
Nous voulons que GPIOA.5 soit en sortie (output push-pull) et GPIOC.13 en entrée (input floating), soit :
Affecter la valeur b0001 aux bits 20 21 22 23 du registre CRL de GPIOA :
GPIOA->CRL = GPIOA->CRL & ~(0xF << 20); // output push-pull b0001 GPIOA->CRL = GPIOA->CRL | (0x01 << 20); // output push-pull b0001Affecter la valeur b0100 = 0x04 au bits 20 21 22 23 du registre CRH de GPIOC :
GPIOC->CRH = GPIOC->CRH & ~(0xF << 20); // input floating b0100 GPIOC->CRH = GPIOC->CRH | (0x04 << 20); // input floating b0100
Pour vérifier que cela est bien fait, compilez le code en simulation, puis lancer le debug. Mettez un point d’arrêt au niveau de la bouclewhile. Ouvrez les fenêtres peripheral->GPIOA et peripheral->GPIOC. Lancez l’application et parcourez les broches pour observer leur configuration.
Maintenant, vous allez mettre en place dans la boucle une scrutation de l’état du bouton USER. Ce bouton est branché sur le GPIOC.13. En écrivant
while(1) {
if (GPIOC->IDR & (0x01 << 13)){
}
}le bit 13 du registre IDR du port C est évalué à chaque fois que la boucle est exécutée. On regarde donc si le bouton est pressé ou non.
Changeons maintenant l’état de la broche 5 du port A pour allumer et éteindre la led à chaque appui sur le bouton. Pour cela nous allons tester la valeur actuelle de la broche et l’inverser. Ajoutez dans la boucle while(1) :
while(1){
if (GPIOC->IDR & (1 << 13)){
if (GPIOA->ODR & (1 << 5) { // la broche 10 est dans l’état 1
GPIOA->ODR = GPIOA->ODR & ~(1 << 5); // On passe à 0 le bit 10 de ODR
} else {
GPIOA->ODR = GPIOA->ODR | (1 << 5); // On passe à 1 le bit 10 de ODR
}
}
}Cette opération peut être réalisée bien plus efficacement avec un XOR avec 1 sur le bit 5, soit en remplaçant le code précédent par les lignes :
while (1) {
if (GPIOC->IDR & (1 << 13)){
GPIOA->ODR = GPIOA->ODR ^ (1 << 5);
}
}Pour tester cela, compilez en simulation, placez un point d’arrêt au niveau du test (GPIOA->ODR= GPIOA->ODR ^ (1 << 5)) et ouvrez les fenêtres de débug de GPIOA et GPIOC.
Après avoir lancé l’exécution vous pouvez changer l’état du bit 13 de IDR pour le GPIOC en cliquant simplement dans le carré représentant le bit qui vous intéresse (ligne Pins dans le fenêtre d'un port).
Faites avancer l’exécution et observer la valeur de ODR de GPIOA. Changez la valeur de IDR pour le GPIOC et observez de nouveau ODR de GPIOA, faites avancer plusieurs fois l’exécution.
Normalement vous constaterez que nous n’avons pas le comportement souhaité car la led change d’état tant que le bouton USER est pressé, or nous voulons seulement modifier la led quand le bouton est pressé.
Une solution simple est donc de simplement mémoriser l’état précédent du bouton en ajoutant une nouvelle variable qui stocke l’état précédent du bouton. Pour cela, déclarez dans le main une variablestate :
void main(void){
...
int state = 0;
while(1){
...
}
}Il faut maintenant changer l’état de la led uniquement si state est différent de l’état actuel du bouton et enfin, ne pas oublier de mettre à jour state, soit
while(1) {
if (state != GPIOC->IDR & (1 << 13)){
GPIOA->ODR ^= (1 << 5);
}
state = GPIOC->IDR & (1 << 13);
}Compilez, lancez le débogueur et observer le comportement de votre led quand vous changez l’état de GPIOC.13.
Bravo, vous venez de faire l’équivalent du Hello World matériel !
Tester sur la cible réelle
Si vous disposez de la carte, nucleo compilez votre programme pour la cible réelle et passez en débogue. Lancez l’exécution et testez en appuyant sur le bouton USER. Normalement vous venez d’allumer la led. Appuyez une nouvelle fois, elle s’éteint.
À la fin de ce chapitre, vous êtes capable :
de trouver l'adresse et de manipuler les structures décrivant la configuration d'un périphérique,
de configurer un port d'entrée/sortie,
de lire et écrire sur un port d'entrée/sortie.
